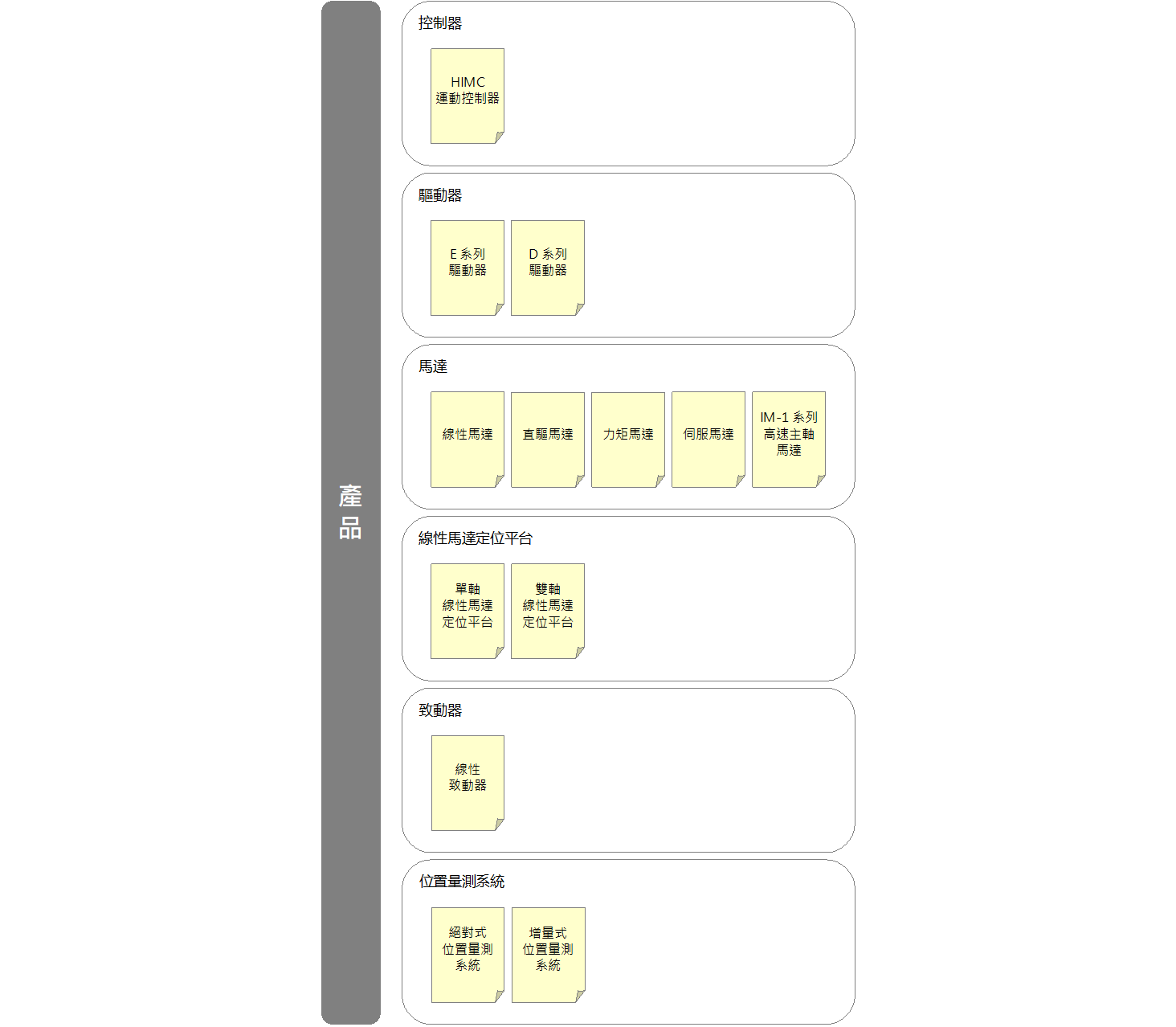
相關文件
產品相關文件的關係圖表如下,請視需要參閱文件。
|
產品 |
文件名稱 |
文件編號 |
內容 |
||
|
Nano
Positioning Controller |
NPC系列 |
MB02UC01-□□□□ |
詳細說明NPC的選擇、安裝、連接等。 |
||
|
NPC系列功能操作手冊 |
MB03UC01-□□□□ |
詳細說明NPC的設定、調機、監控等。 |
|||
|
NPC系列HiMotion Studio使用手冊 |
MB04UC01-□□□□ |
詳細說明NPC的人機介面操作。 |
|||
|
控制器 |
HIMC系列 運動控制器 |
MH07UC01-□□□□ |
詳細說明HIMC運動控制器的安裝、連接等。 |
||
|
MH12UC01-□□□□ |
詳細說明HIMC3運動控制器的安裝、連接等。 |
||||
|
MH01UC01-□□□□ |
詳細說明HIMC系列運動控制器的人機介面操作。 |
||||
|
MH02UC01-□□□□ |
詳細說明Modbus TCP通訊協定應用於HIMC系列運動控制器的方式。 |
||||
|
MH06UC01-□□□□ |
詳細說明HIMC系列運動控制器的HMPL函式庫。 |
||||
|
MH05UC01-□□□□ |
詳細說明HIMC系列運動控制器的API函式庫。 |
||||
|
驅動器 |
E系列驅動器 |
技術手冊 |
MD09UC01-□□□□ |
詳細說明E1系列驅動器的選擇、安裝、連接、設定、試運轉、調機、監控等。 |
|
|
MD28UC01-□□□□ |
詳細說明E2系列驅動器的選擇、安裝、連接、設定、試運轉、調機、監控等。 |
||||
|
MD48UC01-□□□□ |
詳細說明E2-R系列驅動器的選擇、安裝、連接、設定、試運轉、調機、監控等。 |
||||
|
E2-DC系列驅動器使用者操作手冊 |
MD50UC01-□□□□ |
詳細說明E2-DC系列驅動器的選擇、安裝、連接、設定、試運轉、調機、監控等。 |
|||
|
MD34UC01-□□□□ |
詳細說明將E1系列驅動器與D1系列驅動器置換為E2系列驅動器的方式。 |
||||
|
MD12UC01-□□□□ |
詳細說明E系列驅動器的人機介面操作。 |
||||
|
MD22UC01-□□□□ |
詳細說明E系列驅動器龍門控制系統的使用方式。 |
||||
|
MD27UC01-□□□□ |
詳細說明E系列驅動器電子凸輪控制系統的使用方式。 |
||||
|
MD32UC01-□□□□ |
詳細說明E系列驅動器多工位功能的使用方式。 |
||||
|
MD53UC01-□□□□ |
詳細說明E系列驅動器力量控制功能的使用方式。 |
||||
|
MD54UC01-□□□□ |
詳細說明E系列驅動器自動追焦控制功能的使用方式。 |
||||
|
MD43UC01-□□□□ |
詳細說明E系列EtherCAT驅動器透過Ethernet
over EtherCAT連線Thunder的前置作業。 |
||||
|
MD25UC01-□□□□ |
詳細說明E系列驅動器的PDL範例程式。 |
||||
|
通訊手冊 |
MD08UC01-□□□□ |
詳細說明EtherCAT通訊協定應用於E系列驅動器的方式。 |
|||
|
MD24UC01-□□□□ |
詳細說明MECHATROLINK-III通訊協定應用於E系列驅動器的方式。 |
||||
|
MD02UC01-□□□□ |
詳細說明PROFINET通訊協定應用於E系列驅動器的方式。 |
||||
|
MD44UC01-□□□□ |
詳細說明EtherNet/IP通訊協定應用於E2系列驅動器的方式。 |
||||
|
MD19UC01-□□□□ |
詳細說明E系列驅動器與D系列驅動器的MPI函式庫。 |
||||
|
MD18UC01-□□□□ |
詳細說明E系列驅動器與D系列驅動器的MPI範例程式。 |
||||
|
MD23UC01-□□□□ |
詳細說明E系列驅動器與D系列驅動器的API函式庫。 |
||||
|
應用手冊 |
MD55UC01-□□□□ |
詳細說明E系列EtherCAT驅動器搭配HIMC3運動控制器時,軟體iA Studio的操作。 |
|||
|
MD39UC01-□□□□ |
詳細說明E系列EtherCAT驅動器搭配OMRON
NJ與NX系列PLC時,PLC軟體Sysmac Studio的操作。 |
||||
|
MD38UC01-□□□□ |
詳細說明E系列EtherCAT驅動器搭配Beckhoff
EtherCAT運動控制產品時,軟體TwinCAT 3的操作。 |
||||
|
MD40UC01-□□□□ |
詳細說明E系列EtherCAT驅動器搭配KEYENCE
KV-7000系列PLC時,PLC軟體KV STUDIO的操作。 |
||||
|
MD56UC01-□□□□ |
詳細說明E系列EtherCAT驅動器搭配INOVANCE
AC800系列控制器時,控制器軟體InoProShop的操作。 |
||||
|
MD57UC01-□□□□ |
詳細說明E系列EtherCAT驅動器搭配ACS控制器時,軟體SPiiPlus MMI
Application Studio的操作。 |
||||
|
MD31UC01-□□□□ |
詳細說明E系列MECHATROLINK-III驅動器搭配YASKAWA MP3000系列運動控制器時,運動控制器軟體MPE720的操作。 |
||||
|
MD37UC01-□□□□ |
詳細說明E系列MECHATROLINK-III驅動器搭配KEYENCE KV-7000系列PLC時,PLC軟體KV
STUDIO的操作。 |
||||
|
MD51UC01-□□□□ |
詳細說明E系列MECHATROLINK-III驅動器搭配新代CNC控制器時,控制器內建的人機介面操作。 |
||||
|
MD30UC01-□□□□ |
詳細說明E系列PROFINET驅動器搭配Siemens S7系列PLC時,PLC軟體TIA Portal的操作。 |
||||
|
MD46UC01-□□□□ |
詳細說明E2 EtherNet/IP驅動器搭配Allen-Bradley
(Rockwell) PLC時,PLC軟體Studio
5000的操作。 |
||||
|
MD35UC01-□□□□ |
詳細說明E系列EtherCAT驅動器搭配OMRON
Sysmac Studio時,應用功能區塊的使用方式。 |
||||
|
MD36UC01-□□□□ |
詳細說明E系列EtherCAT驅動器搭配KEYENCE
KV STUDIO時,應用功能區塊的使用方式。 |
||||
|
MD33UC01-□□□□ |
詳細說明E系列MECHATROLINK-III驅動器搭配YASKAWA MPE720時,應用功能區塊的使用方式。 |
||||
|
MD41UC01-□□□□ |
詳細說明E系列MECHATROLINK-III驅動器搭配KEYENCE KV STUDIO時,應用功能區塊的使用方式。 |
||||
|
MD42UC01-□□□□ |
詳細說明E系列PROFINET驅動器搭配Siemens TIA Portal時,應用功能區塊的使用方式。 |
||||
|
MD45UC01-□□□□ |
詳細說明E2 EtherNet/IP驅動器搭配Rockwell Studio
5000時,應用功能區塊的使用方式。 |
||||
|
D系列驅動器 |
MD20UC01-□□□□ |
詳細說明D1驅動器的選擇、安裝、連接、設定、試運轉、調機、監控等。 |
|||
|
MD07UC01-□□□□ |
詳細說明D2T驅動器的選擇、安裝、連接、設定、試運轉、調機、監控等。 |
||||
|
MD11UC01-□□□□ |
詳細說明D2T-LM驅動器的選擇、安裝、連接、設定、試運轉、調機、監控等。 |
||||
|
MD19UC01-□□□□ |
詳細說明E系列驅動器與D系列驅動器的MPI函式庫。 |
||||
|
MD18UC01-□□□□ |
詳細說明E系列驅動器與D系列驅動器的MPI範例程式。 |
||||
|
MD23UC01-□□□□ |
詳細說明E系列驅動器與D系列驅動器的API函式庫。 |
||||
|
MD13UC01-□□□□ |
詳細說明D系列驅動器的PDL範例程式。 |
||||
|
馬達 |
線性馬達 |
MP99UC01-□□□□ |
詳細說明線性馬達的選擇、安裝、連接等。 |
||
|
直驅馬達 |
MR01UC01-□□□□ |
詳細說明DMN系列直驅馬達的選擇、安裝、連接等。 |
|||
|
DMT系列直驅馬達使用者操作手冊 |
MR03UC01-□□□□ |
詳細說明DMT系列直驅馬達的選擇、安裝、連接等。 |
|||
|
MR04UC01-□□□□ |
詳細說明DMY系列直驅馬達的選擇、安裝、連接等。 |
||||
|
MR05UC01-□□□□ |
詳細說明DMS系列直驅馬達的選擇、安裝、連接等。 |
||||
|
MR07UC01-□□□□ |
詳細說明DMH系列直驅馬達的選擇、安裝、連接等。 |
||||
|
力矩馬達 |
MW99UC01-□□□□ |
詳細說明力矩馬達的選擇、安裝、連接等。 |
|||
|
伺服馬達 |
MC03UC01-□□□□ |
詳細說明E系列AC伺服馬達的選擇、安裝、連接等。 |
|||
|
IM-1系列 高速主軸馬達 |
MS01UC01-□□□□ |
詳細說明IM-1系列高速主軸馬達的選擇、安裝等。 |
|||
|
線性馬達 定位平台 |
單軸 線性馬達定位平台 |
MM06UC01-□□□□ |
詳細說明單軸線性馬達定位平台的選擇、安裝、連接等。 |
||
|
MM14UC01-□□□□ |
詳細說明奈米定位平台的選擇、安裝、連接等。 |
||||
|
雙軸 線性馬達定位平台 |
MM18UC01-□□□□ |
詳細說明雙軸線性馬達定位平台的選擇、安裝、連接等。 |
|||
|
致動器 |
線性致動器 |
MA99UC18-□□□□ |
詳細說明線性致動器的選擇、安裝、連接等。 |
||
|
位置量測系統 |
絕對式 位置量測系統 |
ME06UC01-□□□□ |
詳細說明絕對式位置量測系統的選擇、安裝、連接等。 |
||
|
增量式 位置量測系統 |
ME07UC01-□□□□ |
詳細說明增量式位置量測系統的選擇、安裝、連接等。 |
|||
|
ME08UC01-□□□□ |
詳細說明PM系列增量式位置量測系統的選擇、安裝、連接等。 |
||||